- 服务热线:400-900-9059
- EN
-



当很多人都以为数字化口腔种植技术大多以种植导板形式落地时,种植导航已经逐渐以更科技化与未来化的形象站在了我们所有口腔医生的面前。
从行车路线到卫星轨迹,都是导航使用的重要场景。
5月22日,一个名为“以导航之名,俯瞰时代”的小型医用导航跨界应用专家交流沙龙在上海举行,参加本场沙龙的多为国内对实时导航口腔种植领域有一定经验与研究的口腔医生们,沙龙特别邀请曾获诺贝尔奖提名的CT影像应用之父Terry Peters教授、上海交大Med-X研究院顾力栩教授作为跨界专家为大家介绍医疗导航在大临床相关学科中的应用与研究方向,满毅教授(华西口腔医学院)与吴轶群教授(上海交通大学口腔医学院)作为国内较早开展导航下实施口腔种植外科的专家,也带来了各自课题组在此领域的实践结果与经验,集中向口腔医生们展示了实时导航在口腔种植领域的应用前景。
今日小编也有幸受邀亲临沙龙现场,提前窥视未来种植领域的工作场景与模式。本文将与各位共同分享这场沙龙中的精彩内容,主要包括各位专家所讨论的医疗导航的应用与其在口腔领域展现出的巨大潜力。

<1> 医学导航离我们有多近?
可能大家都非常想了解导航离我们的口腔种植治疗有多远,会给我们的临床工作带来什么改变?但在聚焦口腔种植之前,有必要先了解一下实时导航发展至今在大临床中所发挥的重要作用与意义。在神经外科、骨科、心胸外科等对手术精确度要求超出医生经验判断极限的医疗领域,手术导航系统经过在欧美发达国家30年的发展,已成为国际性的标准配置。
在漫威电影《奇异博士》中,神经外科医生出身的Doctor Strange手术时就有提到导航,而神经外科因其操作的精细化与复杂程度,是最早将导航应用于手术的学科之一,本次沙龙所邀请的曾获诺贝尔奖提名的Terry Peters教授也是最早一批在此领域作出杰出贡献的专家之一。

电影Doctor Strange截图
Terry Peters教授的发言内容主要包括以下3部分:
第一部分,人们需要导航设备和机器人辅助手术的主要目的是Navigation(导航)和Position(定位),对于这两个功能大家可以回想一下汽车导航的“指路”功能和倒车摄像头所完成的任务;
第二部分,在一些复杂而又危险的手术诸如心脏手术治疗、腹腔镜手术治疗中,影像导航对临床手术尤为重要,实时导航和术中影像不仅帮助医生一定程度上降低手术的复杂程度还有助于规避风险;
第三部分,AR(增强现实)与VR(虚拟现实)是目前手术导航领域的热门研究方向,这两个技术成熟后有助于解放医生手术过程中的视觉落点问题(是看导航屏幕还是看实际的手术视野)。
Terry Peters教授最终强调的是, 实际上导航早已走进医学 。

Terry Peters教授,曾获诺贝尔奖提名,加拿大医学物理学院院士,美国医学物理学院院士,电器电子工程学会会士,澳大利亚医学物理科学与工程学院院士,国际医学影像计算及计算机辅助介入学会会士

著名种植专家、来自香港的周国辉教授也被邀请参加本次沙龙,周教授也已在数字化种植及口腔颌面外科领域进行了不少工作,他现场就力反馈的相关问题与Terry教授进行了交流。

沙龙主办方迪凯尔公司的CEO陈云先生对VR(虚拟现实)的未来研究方向与进展非常感兴趣,就此提问Terry教授,我们有理由猜测或许未来迪凯尔公司种植导航系统中将加入此功能。
<2> 口腔种植导航时代临近
相较于传统的自由手定位,数字化技术对种植的意义毋庸置疑;而目前,只要一提到数字化流程,作为口腔医生我们都很熟悉的可能是数字化种植导板对种植外科的辅助。在本次沙龙中,满毅教授介绍了数字化技术辅助的植入种植体的方法有两个:数字化种植导板(Digital Impant Surgery Template)与数字种植导航(Digital Impant Surgery Navigation)。
当很多医生纠结是否要采用种植导板,或对种植导航的印象仅仅停留在“概念型产品”时,来自华西口腔医学院种植科的满毅教授与杨醒眉教授及课题组成员们已在近年来对上述两种数字化种植技术都进行了诸多临床实践与思考。
对于数字种植导航,满毅教授介绍其原理是通过光学定位系统实时追踪患者口腔和手术器械的空间位置,通过计算机配准技术将患者口腔空间和虚拟影像(植入计划)匹配到一起。
大家不明白上述原理不要紧,一个种植的实时导航大概长下面这样:
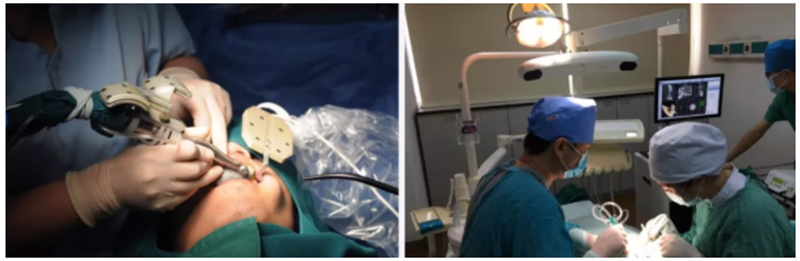
这款迪凯尔公司自主研发生产的“易植美”数字化口腔种植实时导航系统目前已上市
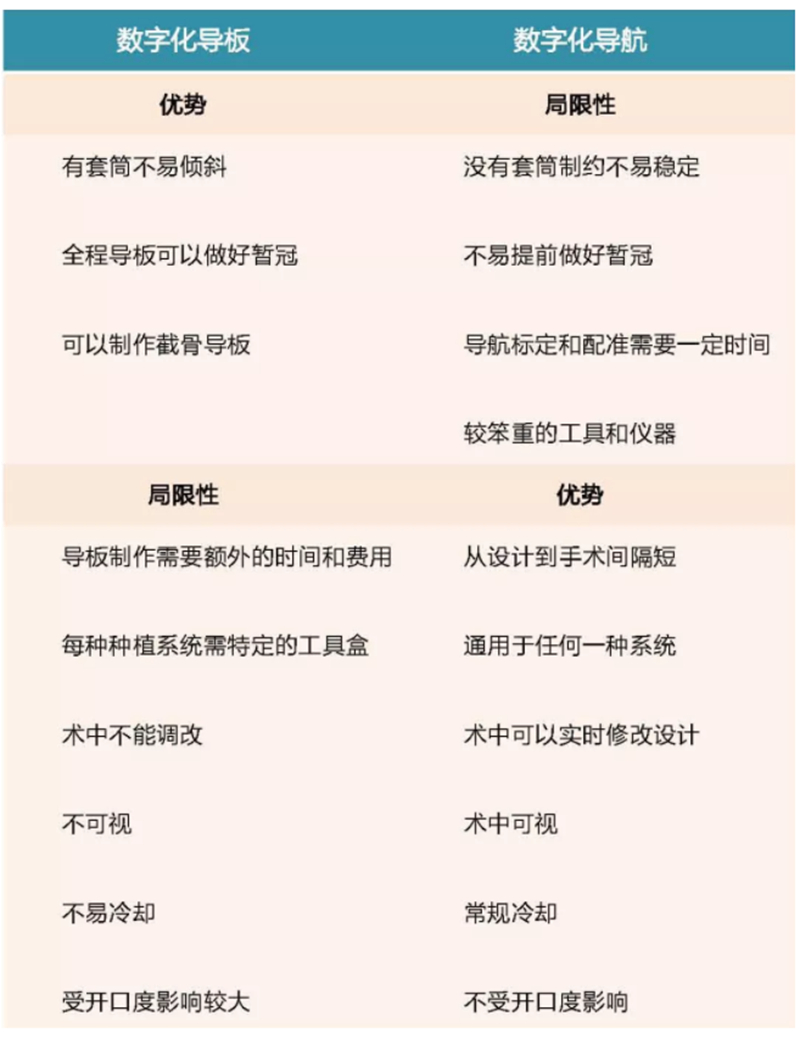
据满毅教授介绍,数字种植导航的基本使用流程:佩戴U型管→拍摄CBCT→术前设计→术中实时导航。而对比数字化种植导板和数字种植导航时,满毅教授分别介绍了二者的优势与局限性:

满毅教授还介绍了如何利用导航引导种植的病例——避开埋伏阻生牙,美学引导种植
在满毅教授介绍的病例实践中,我们不仅能看到实时的数字种植导航在种植外科手术中的作用,同时满毅教授、杨醒眉教授及课题组成员们还结合DSD(微笑美学设计)、口内扫描获得的信息与CBCT获得的解剖结构信息相结合,应用于术前设计,做到以修复为导向的种植治疗。
对于如何将上述三者——DSD获得的信息、口内扫描的STL信息与CBCT获得的dicom格式图像相结合,来自上海交大九院的吴轶群教授也在现场与杨醒眉教授进行了深入探讨。

吴轶群教授
颧骨种植是解决临床上颌后牙区骨量重度不足及严重萎缩无牙上颌种植修复的有效方法,九院的种植团队已成为国际应用实时动态导航引导颧种植体植入术的主要机构,上海交大第九人民医院吴轶群教授团队在国内口腔颧骨种植修复方面享有盛名。在本次沙龙中,由吴轶群教授团队中的王凤教授为大家展示了颌骨缺损患者实时导航种植——无牙颌颧种植病例,王凤教授从自由手进行颧种植体植入的风险性谈起,进而分析了静态导板辅助植入的局限性,认可了导航技术对于此类复杂且风险较大病例的适用性。
对于实时导航,稍有了解的医生可能都会关注其延迟程度与精确度,在现场医生问及此问题时,王凤教授介绍,在颧种植这样的复杂病例实践中,相关的精度研究(对比术前规划位置与导航下实际植入情况)也证实了实时导航下植入颧种植体的误差在临床可接受范围内——进点误差中位数为1.35 mm,植点误差中位数为2 mm,角度偏差2°。

王凤教授
王凤教授还阐述了她对未来口腔种植手术导航发展的思考——其实导航设备的误差包括CBCT影像的误差、标定误差等都是可以计算出来的,而最不确定的误差来自于人为因素(包括患者因素与医生因素两方面),对人为因素的控制是我们研究的着力方向,而从一些个例中我们能看到,机械臂应用于种植手术或可能成为我们未来新的希望。
<3> 导航已来,那VR呢?机器人呢?
在未来,不仅导航会为医疗带来巨大改变,VR、AR、人工智能乃至机器人都会成为我们医疗工作的一部分。上海交大Med-X研究院顾力栩教授在本次沙龙中带来了他在2017年机器人大会中演讲的主要内容——基于虚拟现实技术的机器人辅助心血管介入手术规划和安全防护,他介绍,在聚焦手术机器人的辅助作用时,手术机器人目前面临的问题主要是安全性与可靠性,上海交大Med-X研究院也经过努力取得了一定成果,在心血管介入手术方向,综合运用计算机技术、机器人技术、医学成像技术、传感器技术,力求实现心脏介入手术机器人的路径规划与安全防护。
目前,导航在医疗各个领域的延伸与应用都证实了它或将成为是未来医疗行为尤其是外科相关操作中不可缺席的一部分,而导航的应用与力反馈技术的发展成熟都是帮助手术机器人变得更安全与更靠谱的一种途径。

顾力栩教授
顾教授指出:“ 手术的关键是植入物的精确定位 。”其实这一点与我们所从事的口腔种植治疗十分相似,相信科技对心脏介入、神经外科等领域手术的推动与促进作用也会给我们口腔医疗带来广泛的启发。

Terry Peters教授对口腔种植导航表现出浓厚的兴趣,并希望“自己的牙医也能有一套这样的导航系统”
可能很多读到本文的医生们在工作中并没有怎么接触过导航,也并没有感受过动态导航下的操作。临床操作对口腔医疗的重要性不言而喻,我们每位医生都希望能够在术中看得更多、做得更细,而我们有幸生在这个科技与医学共同相伴飞速发展的时代,唯一要做的就是伸出双手拥抱可能的改变与美好。
 扫一扫关注我们
扫一扫关注我们